咨询热线 / 售后热线:0755-82096699或82094518(AM8:30~PM5:30)
线上申请平台

谷歌在无人驾驶领域一直处于研发热点,而2016年12月,其旗下子公司伟摩公司(Waymo)正式成立,主要从事无人驾驶技术的研究。2017年11月,Waymo宣布该公司开始在驾驶座上不配置安全驾驶员的情况下测试自动驾驶汽车。 2018年5月,WAYMO LLC 100%持股公司慧摩商务咨询(上海)有限公司在上海自贸区注册。
无人驾驶汽车,又称为自动驾驶汽车、电脑驾驶汽车或轮式移动机器人,是无人地面载具的一种,具有传统汽车的运输能力。作为自动化载具,自动驾驶汽车不需要人为操作即能感测其环境及导航。驾驶汽车能以雷达、光学雷达、GPS及电脑视觉等技术感测其环境。先进的控制系统能将感测资料转换成适当的导航道路,以及障碍与相关标志。根据定义,自动驾驶汽车能透过感测输入的资料,更新其地图资讯,让交通工具可以持续追踪其位置,即使条件改变,或汽车驶进了未知的环境内。
笔者结合项目经验,就谷歌无人驾驶技术专利进行简单分析。
01专利申请趋势分析
从2005年开始谷歌就开始在无人驾驶技术领域进行专利申请,截止到2018年为止,共拥有无人驾驶汽车相关专利960件,508项专利族;该公司在中国共申请了72件专利,60项专利族。主要申请人为Waymo LLC和伟摩有限责任公司,部分专利申请人为谷歌公司,后成立伟摩子公司后,将专利权均转移到伟摩公司。
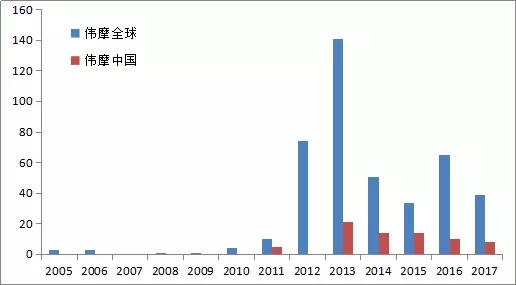
图1 伟摩公司在中国和全球范围专利申请趋势
根据图1可知,伟摩公司在全球范围内2005年就开始对无人驾驶汽车方面的专利进行申请,在2011年之前该公司的专利申请量都维持在几件专利的范围,从2011年到2013年期间,伟摩公司在这两年期间递交了大量的专利,2013年在全球范围内递交了141件专利,达到顶峰,随后在2014年开始其专利申请量递减,到50件左右,2014年至今保持每年在40-60件之间的专利申请量。
而伟摩公司在2010年开始,在中国布局了第一件关于无人驾驶的专利,2013年该公司在中国布局专利数量达到顶峰,为21件,随后从2014年开始,在中国的专利布局数量逐渐递减到14件,并随后几年均保持在10件左右。从整体上可以看到,伟摩公司在中国的专利布局趋势与其在全球的专利布局趋势保持一致。
02专利申请地域分析
伟摩公司隶属于谷歌集团,本部在美国,专利申请首先在美国进行申请,根据图 2可知,其在美国申请量达到762件专利,中国和欧盟为较大的市场国,在中国和欧盟进行了一定量的专利布局,申请数量均为100多件专利,同时在其他国家,如韩国、澳大利亚等国家也布局了相应的专利。
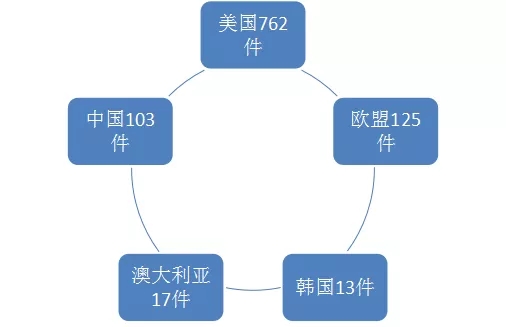
图 2 伟摩公司专利布局地域分布图
03在华专利法律状态分析
伟摩公司在华的72件专利申请有效性如表1所示,其中“审中”表示该申请处于审查状态中,还没有获得专利权或被驳回;“授权”有效代表该申请已经获得专利权,且维持专利权有效,处于受保护的状态;“失效”表示其已经被驳回或撤回失效,不受保护。

表1 伟摩公司在华专利有效情况
从表1可以得出,伟摩公司在华的72件专利申请的有效性都处于授权有效和审中状态,没有处于无效状态的专利。其中有35件专利处于授权有效状态,37件专利处于审查中状态。此外伟摩公司在中国的专利申请均为发明,没有实用新型。从伟摩公司授权专利数量多、类型也均为发明可以看出,伟摩公司在中国的专利申请质量很高。
04无人驾驶技术主题分析
无人驾驶技术分支可分为模式转换、摄像识别、定位导航、避障避让、制动、停车泊车等这些技术分支是无人驾驶领域较为关键的技术。其中涉及模式转换的专利占比达到29%,其次为避障避让,占比19%,其次为涉及定位导航、摄像识别的专利,而涉及制动和停车泊车的技术占比仅为10%和8%。
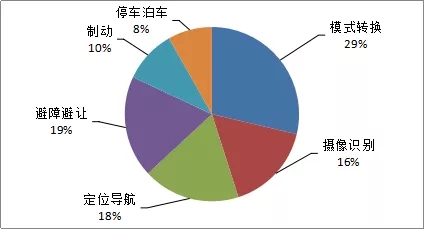
图3 无人驾驶领域技术主题分布占比
05无人驾驶避障技术重要专利分析
无人驾驶技术中障碍物的探测是安全驾驶的基础。通常障碍物探测分为三个方面:
运动障碍物检测:对运动过程中环境中的运动障碍物进行检测,主要由车载环境感知系统完成。即避开障碍物的第一步就是检测障碍物。
运动障碍物碰撞轨迹预测:对运动过程中可能遇到的障碍物进行可能性评级与预测,判断与无人驾驶车辆的碰撞关系。即当你检测到障碍物后,你就得让机器判断是否会与汽车相撞。
运动障碍物避障:通过智能决策和路径规划,使无人驾驶车辆安全避障,由车辆路径决策系统执行。即判断了可能会与汽车发生碰撞的障碍物后,你就得去让机器做出决策来避障了。
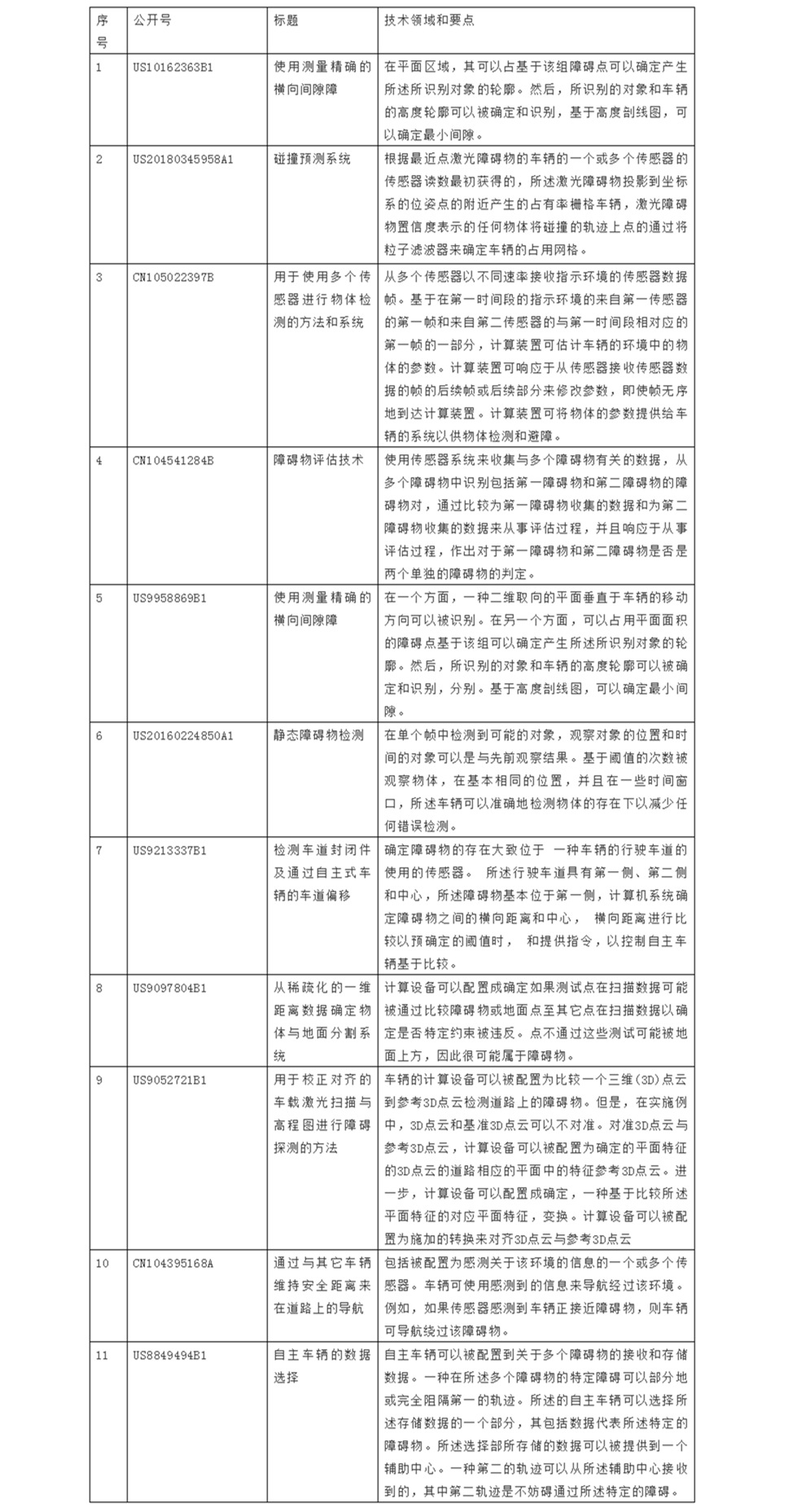
表2 无人驾驶壁障技术专利
重点专利分析
专利 1
US8849494B1,该专利发明名称为Data selection by an autonomous vehicle for trajectory modification。申请日为2013年3月15日,2014年9月30日获得授权,申请人为谷歌公司,后转让到其子公司伟摩公司名下,其法律状态为授权有效,暂时无同族专利,但被引证次数多达66次。
技术方案:自主车辆可以被配置到关于多个障碍物的接收和存储数据。一种在所述多个障碍物的特定障碍可以部分地或完全阻隔第一的轨迹。所述的自主车辆可以选择所述存储数据的一个部分,其包括数据代表所述特定的障碍物。所述选择部所存储的数据可以被提供到一个辅助中心。一种第二的轨迹可以从所述辅助中心接收到的,其中第二轨迹是不妨碍通过所述特定的障碍。
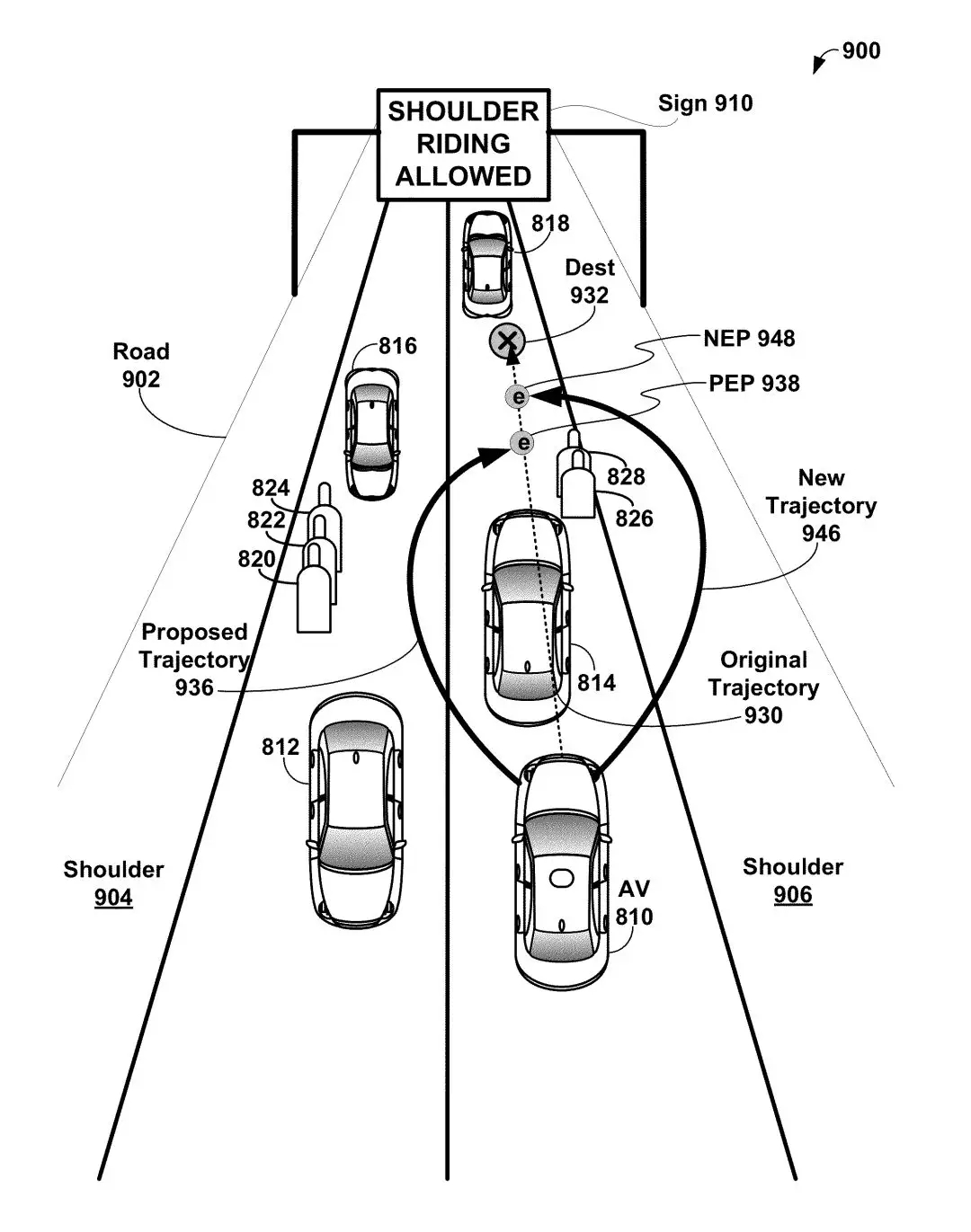
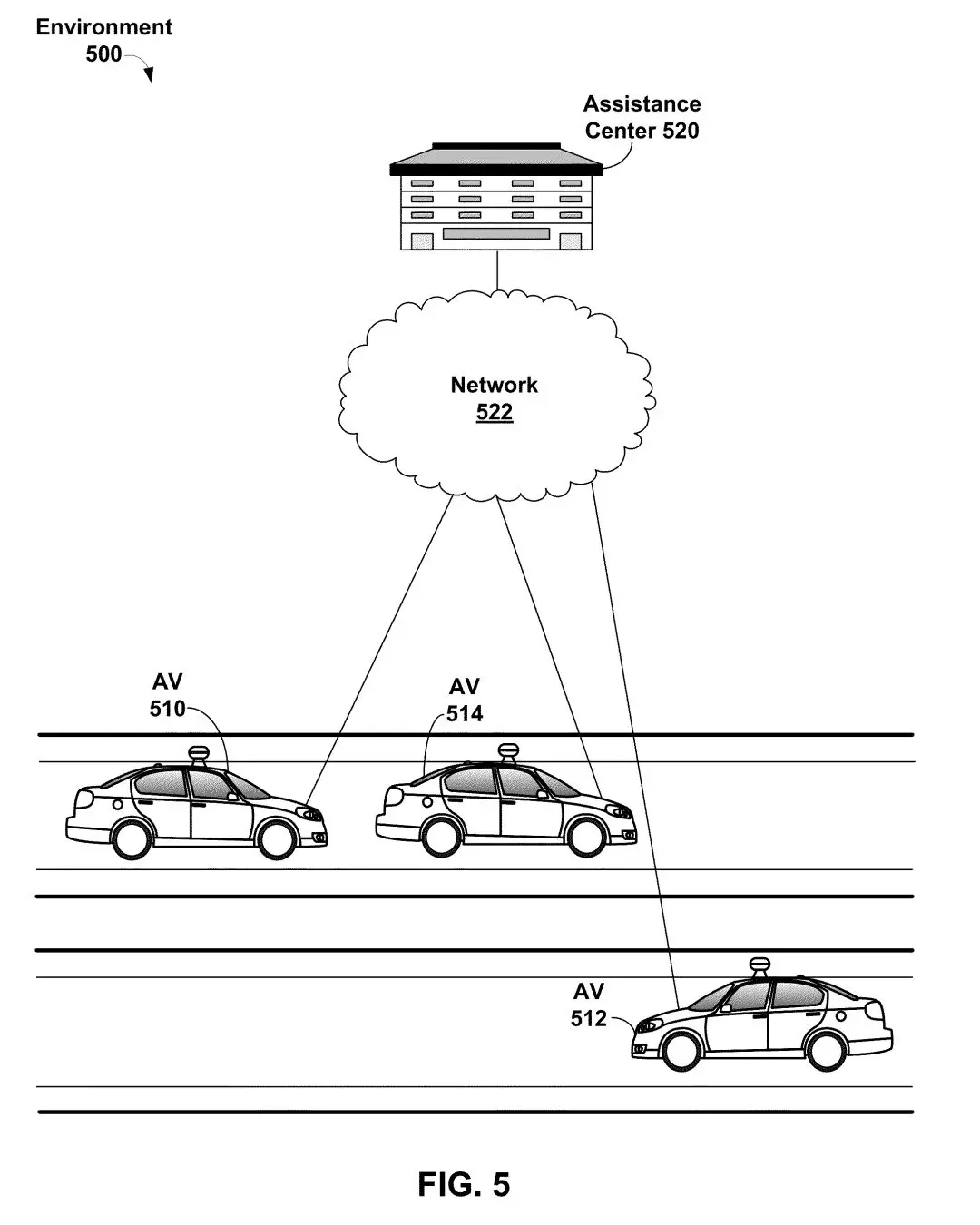
图 8-14 专利US8849494B1的附图
专利重要性:该专利被引证次数达到了66次,次数很多,是避障技术较为重要的基础专利。该专利2013年才开始申请,保护期限很长,因此中国企业比较难以跨越该专利。
专利 2
CN104395168A,该专利发明名称为:通过与其它车辆维持安全距离来在道路上的导航。申请日为2013年4月4日,公开日为2015年3月4日,专利申请人为谷歌公司,后转让给子公司伟摩公司,法律状态为审中,暂时没有获得授权,有14件同族专利,
具体为KR1020140131601A; JP2015523256A; US8504233B1; EP2841316A1; JP5890585B2; EP2841316B1; US8725342B2; WO2013162847A1; US20140018995A1; CN104395168A; EP2841316A4; CN104395168B; EP2841316B8; EP3266667A1,被引证次数为1次。
技术方案:由计算机系统获得提供车辆正在其上行进的道路的车道的估计位置的车 道信息,其中所述计算机系统被配置为在自主模式中控制所述车辆;由所述计算机系统确定所述车道信息已变得不可用或不可靠;以及响应于确定所述车道信息已变得不可用或不可靠,所述计算机系统:使用至少一个传感器来监视至少一个邻近车辆;以及控制所述车辆将所述车辆与所述至少一个邻近车辆之间的距离维持成至少为预定最小距离。
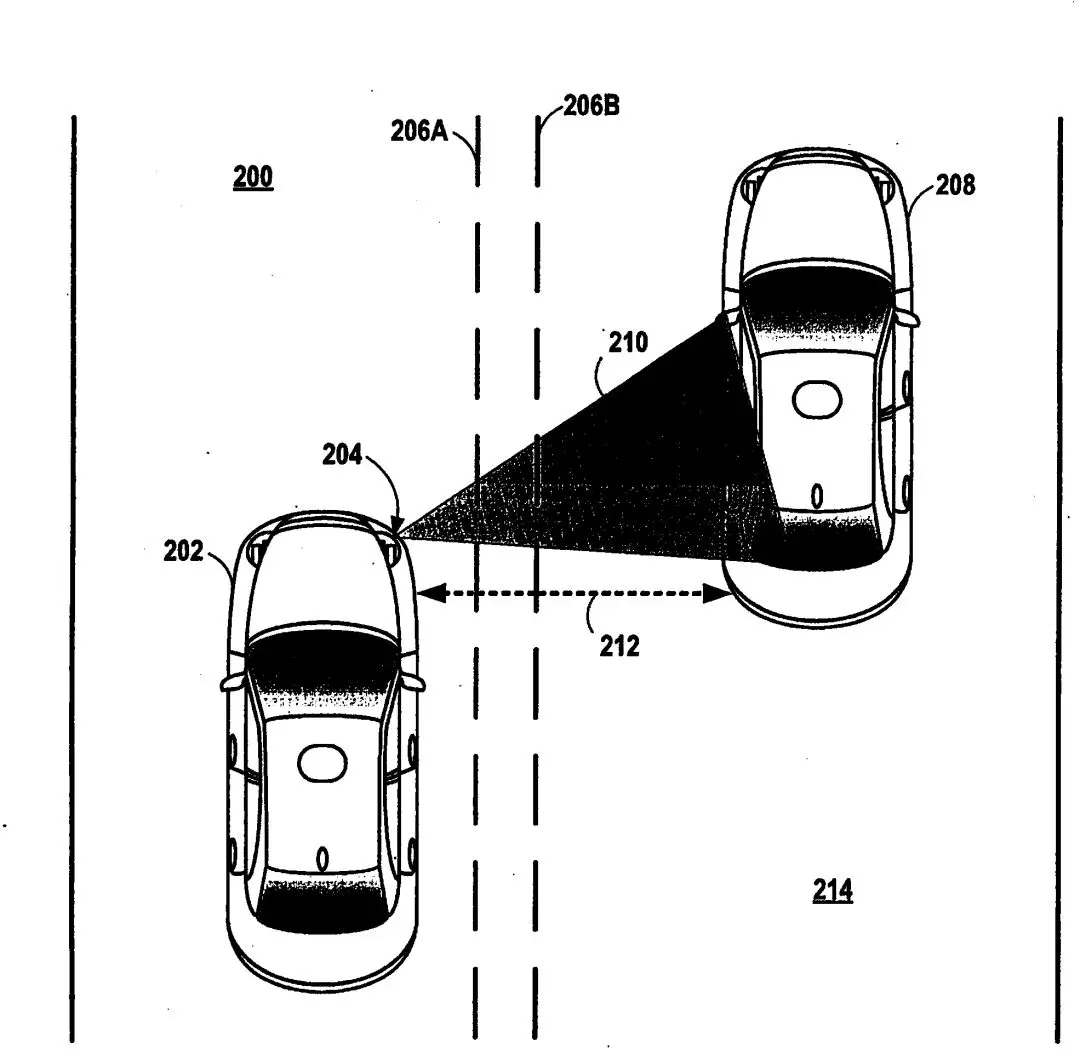
图 8-15专利CN104395168A附图
专利重要性:该专利同族数量多达14件,说明该项技术较为重要,谷歌在美国、欧洲、日本、韩国等多个国家布局了多件相关的专利,该技术由计算机系统来计算旁边障碍物,通过传感器来监视至少一个邻近车辆;以及控制所述车辆将所述车辆与所述至少一个邻近车辆之间的距离维持成至少为预定最小距离。
结语
谷歌无人驾驶领域还涉及多个其他技术,比如模式转换、摄像识别、定位导航、制动、停车泊车等其他方面的重要技术分支,欲知更详细的重要专利情况,中一研究院将免费为您奉上。中一研究院成员平均从业经验7年以上,多名成员具有多年专利审查经验,领域涉及机械、软通等领域,是您进行专利导航、专利分析、专利查新检索的不二选择!

正规备案,深圳本地标杆性代理机构

一对一,服务专业周到

随时案情跟踪,及时反馈

电子、纸质文件备份,安全


 专利代理
专利代理
 商标版权
商标版权
 法律业务
法律业务
 预警分析
预警分析
 涉外业务
涉外业务
 项目申报
项目申报
 其他业务
其他业务
 广东省深圳市福田区益田路5033号平安金融中心A座69层
广东省深圳市福田区益田路5033号平安金融中心A座69层 0755-82096699或82094518(AM8:30~PM5:30)
0755-82096699或82094518(AM8:30~PM5:30) 0755-82100908
0755-82100908  zx@zyip.com(国内)
zx@zyip.com(国内)